Hello! My name is Chad Bonin, and I’m a member of the Endurance22 Expedition sub-sea team. My colleagues and I will be using cutting-edge marine robotics to search for and map the Endurance shipwreck at the bottom of the Weddell Sea. I have worked on many underwater projects around the world during my career in ocean surveying and exploration, but looking for something specific in the Weddell Sea presents a unique set of challenges that requires a very special robot.
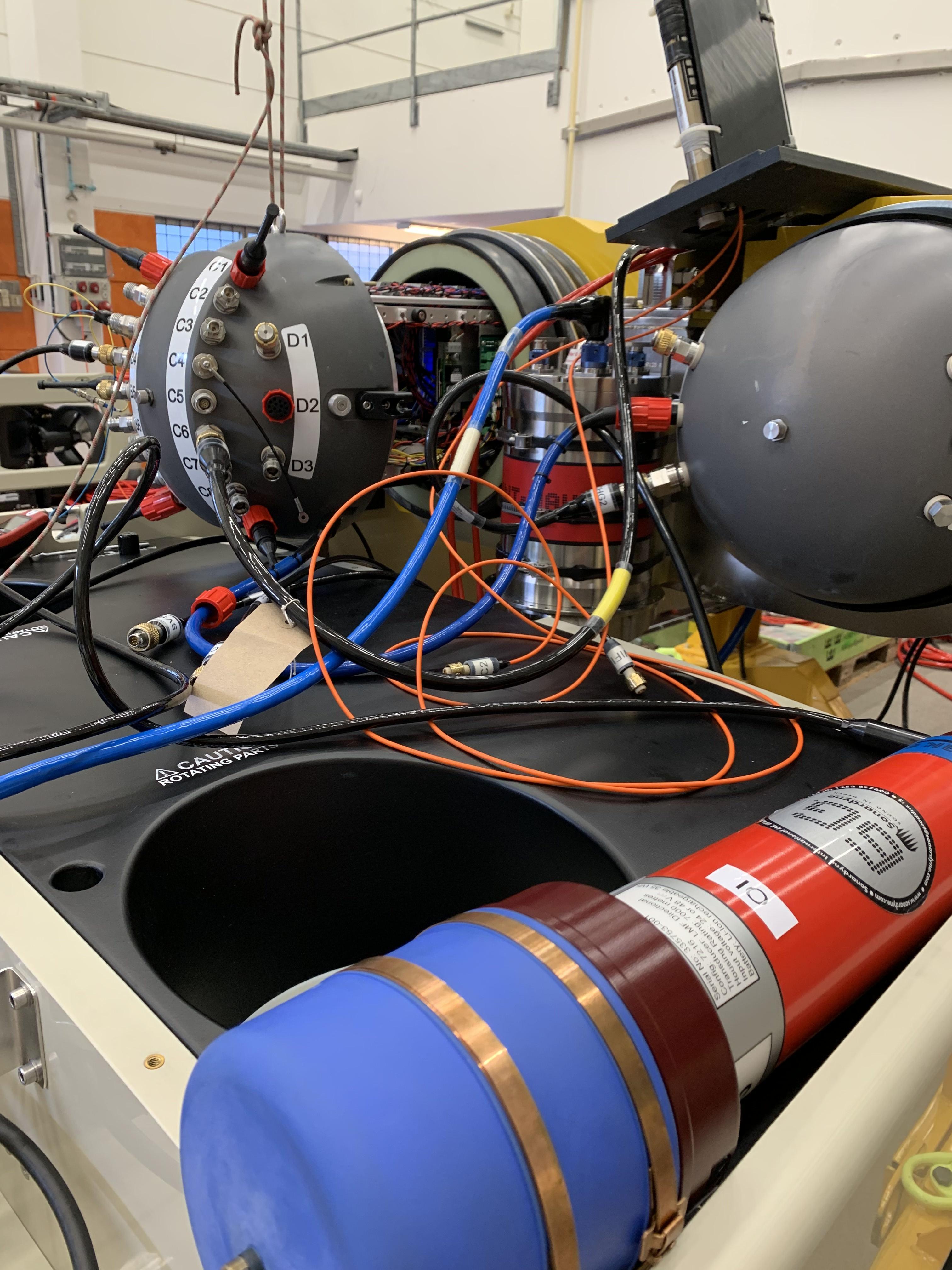
For this expedition, the sub-sea team will be using a Saab Sabertooth, which is a powerful combination of an AUV (autonomous underwater vehicle) and a ROV (remotely-operated vehicle). This advanced marine robot can not only travel 10,000 feet to the Weddell Sea seabed, but it can withstand the incredible pressure of water at that depth without being crushed. The Sabertooth will be connected (or tethered) to the surface through a 15.5-mile-long fiber optic cable, so anything the AUV/ROV “sees” on the seabed, the sub-sea team sees live on the ice.
The Sabertooth will use multibeam sidescan sonar to survey large sections of the seabed, and since the data is flowing live to the surface, the sub-sea team will be able to stop and investigate anything of interest as soon as it appears.